服务机器人与工业控制系统的技术融合与研发新路径
随着人工智能、物联网和先进制造技术的飞速发展,服务机器人与工业控制系统的技术研发正日益成为推动产业智能化升级的核心驱动力。二者的深度融合,不仅重塑了传统工业的生产模式,也开辟了服务机器人更为广阔的应用场景,催生了一系列创新性的技术研发方向。
一、技术融合:构建智能自主的协同作业体系
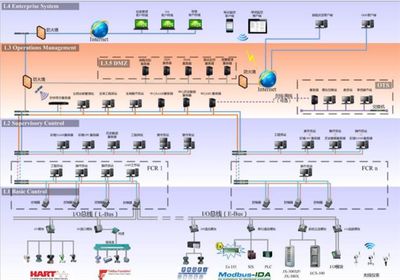
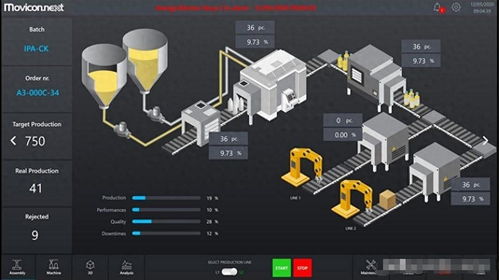
服务机器人,尤其是应用于工业领域的专业服务机器人(如巡检、物流、协作机器人),其核心在于感知、决策与执行。而现代工业控制系统(ICS),包括可编程逻辑控制器(PLC)、分布式控制系统(DCS)和数据采集与监控系统(SCADA),其核心在于对生产流程的精确、可靠、实时控制。二者的技术融合,关键在于建立统一的数据交互协议与智能决策闭环。
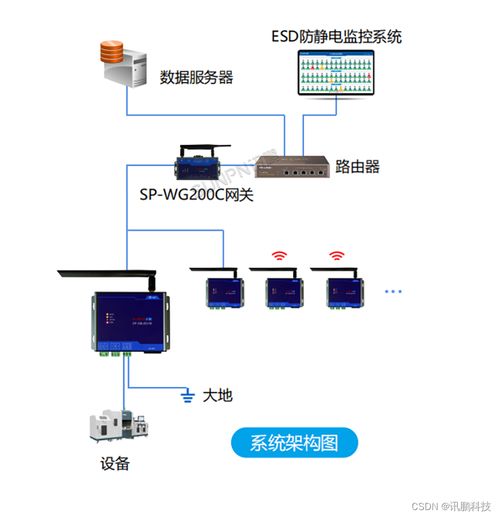
研发重点首先在于通信接口的标准化与安全化。需要研发能够兼容OPC UA、MQTT、TSN(时间敏感网络)等工业通信协议,同时具备强大防火墙与入侵检测能力的边缘计算网关。这使服务机器人能实时、安全地获取生产线的状态数据(如设备参数、物料信息),并将自身的状态(如位置、任务进度、异常诊断)反馈给中央控制系统。
是智能控制算法的集成。将机器人的路径规划、视觉识别、力控交互等AI算法模块,与工业控制系统的实时调度、过程优化算法相结合。例如,研发具备自适应能力的机器人任务调度系统,使其能根据DCS下达的生产订单变化,动态调整物料搬运路线;或使巡检机器人能基于SCADA的预警信息,自主定位并核查设备故障点。
二、核心技术研发方向
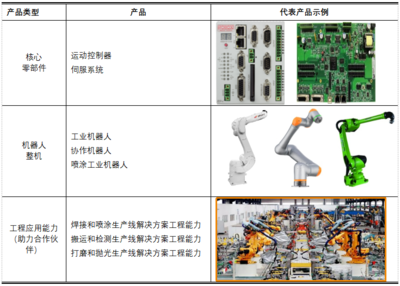
- 高精度环境感知与多维融合定位技术:研发适用于复杂、非结构化工业环境的SLAM(同步定位与地图构建)、3D视觉识别及多传感器(激光雷达、视觉、超声波)融合技术,提升机器人在动态车间中的导航精度和避障鲁棒性。
- 柔顺协作与自适应控制技术:面向人机共融场景,研发先进的力/力矩传感与阻抗控制算法,使机器人能安全、灵巧地与工人协同完成装配、打磨等精细作业。开发能根据工件微小差异自动调整工艺参数的自适应控制模块。
- 基于数字孪生的预测性维护与仿真调试:构建服务机器人及其作业环境的数字孪生模型。研发通过机器人本体传感器数据与工业系统运行数据融合分析,实现对其自身关键部件(如电机、减速器)以及所服务产线设备的预测性健康管理。利用数字孪生进行任务仿真与离线编程,大幅缩短部署调试周期。
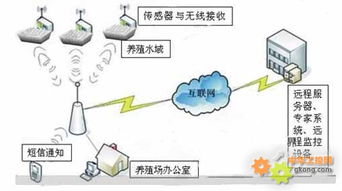
- 边缘-云协同的群体智能与决策优化:研发边缘侧轻量化AI推理模型,使单台机器人能快速响应。通过5G等高速网络将多机器人数据汇聚至云端或车间级服务器,运用群体智能算法进行大规模任务的最优分配与协同路径规划,实现系统整体效率最大化。
- 内生安全与功能安全一体化设计:针对工业控制网络对安全性的极高要求,研发从硬件、操作系统到通信协议的全栈安全架构。将机器人的功能安全(如安全停机、安全限速)与工业控制系统的网络安全深度融合,设计具备内生安全属性的新型控制器,确保在遭受网络攻击或自身故障时能安全降解,保障人身与生产安全。
三、应用前景与挑战
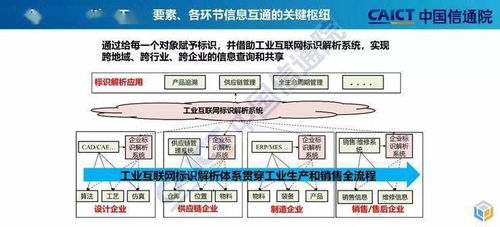
技术研发的深入,将推动服务机器人在智能工厂中扮演更核心的角色——从孤立的自动化单元,转变为联通信息物理系统(CPS)的智能移动节点。应用场景将涵盖柔性产线物料精准配送、全厂区自主巡检与安防、生产设备预测性维护、以及高危环境下的无人化作业等。
挑战依然存在:跨领域技术标准的统一、复杂场景下AI算法的泛化能力、全生命周期成本的控制,以及复合型研发人才的培养,都是亟待突破的瓶颈。
服务机器人与工业控制系统技术的协同研发,是一场深刻的跨界创新。它要求打破机器人与自动化控制之间的传统壁垒,以数据和智能为核心,构建一个感知更全面、决策更智能、执行更柔韧、系统更安全的下一代工业自动化范式。持续聚焦核心关键技术攻关,深化产学研用合作,是赢得这场产业变革主动权的关键。
如若转载,请注明出处:http://www.tianhao6.com/product/73.html
更新时间:2026-06-18 16:13:25